Motion-Control-and-Pathfinding-Techniques-for-Mobile-Robots-AVs-in-Unity
This project implements a variety of algorithms and techniques for path planning (classical algorithms; sampling-based methods and graph search algorithms), triangulation, graph construction, and motion control, enhancing navigational capabilities in dynamic terrains.
推荐合辑
 「今日推荐」合辑by 喵小逗
「今日推荐」合辑by 喵小逗 UI拓展by 胡林超
UI拓展by 胡林超 K神出品,必然很好看by 喵小逗
K神出品,必然很好看by 喵小逗 开发加速器by 贾伟昊(董夕)
开发加速器by 贾伟昊(董夕)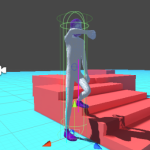 动画与仿真by uwa_Ren
动画与仿真by uwa_Ren
登录后发表评论