Real-Virt-Hand-Digital-twin
An immersive teleoperation system for high-risk tasks at KAERI (e.g., LLRW handling). Built in Unity/C++, it allows intuitive control of a Doosan A0509 robot using Meta Quest hand tracking. The operator is immersed in a real-time 3D digital twin of the site, generated from Azure Kinect data, ensuring safe remote manipulation.
推荐合辑
 「今日推荐」合辑by 喵小逗
「今日推荐」合辑by 喵小逗 UI拓展by 胡林超
UI拓展by 胡林超 K神出品,必然很好看by 喵小逗
K神出品,必然很好看by 喵小逗 开发加速器by 贾伟昊(董夕)
开发加速器by 贾伟昊(董夕)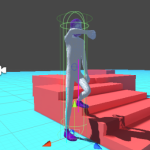 动画与仿真by uwa_Ren
动画与仿真by uwa_Ren
登录后发表评论